在之前的作业中,实现框架所依赖的底层主要是 numpy 库。本讲开始讨论如何利用硬件进行加速,以及如何利用所学知识编写一个底层库以取代 numpy。学习硬件加速的原因是,现在通常要使用大数据集训练大模型,因此通过这些知识可以了解底层细节,了解代码跑得快或跑得慢的真正影响因素。另外,当有重新实现算子的需求时,也可以知道应该如何根据手头的硬件细节做加速。本讲将对一些通用的硬件加速技巧做介绍
通用的加速技术
通常情况下,机器学习开发框架可以被分为两层,上层为计算图,跟踪计算历史,进行梯度计算。下层为张量线性代数库,允许我们创建具体的多维数组,执行计算。到目前为止,needle 的 NDArray 所依赖的底层线性代数库就是 numpy。然而,机器学习算法会被部署在不同的硬件设备上,例如 CPU、GPU、移动设备或者计算集群,其底层依赖的线性代数库实现也是不一样的,因此有必要对这些库的实现细节有所了解,才能有针对性地进行优化,因此首先来看一些常见的优化技术
第一个常见的技术称为向量化(vectorization)。假设要把两个 256 维向量 A 和 B 相加,结果返回到向量 C 中。最简单的方法是
void vanilla_add(float *A, float *B, float *C) {
for (int i = 0; i < 256; i++) {
C[i] = A[i] + B[i];
}
}
但是在当前常见的设备上,通常有加速单元或加速指令,可以加载内存连续的一部分(称为向量寄存器 vector register),并利用这些寄存器做计算,存储结果。因此,我们可以不从 0 迭代到 256(不含),而是迭代到 64,每个迭代一次从 A 中读入 4 个元素,也从 B 中读入 4 个元素。然后,将读到的这两个向量相加,并将结果通过 store_float4 指令写回到内存中的一个连续区域。整个过程可以通过伪代码描述如下
void vec_add(float *A, float *B, float *C) {
for (int i = 0; i < 64; ++i) {
float4 a = load_float4(A + i * 4);
float4 b = load_float4(B + i * 4);
float4 c = add_float4(a, b);
store_float4(C + i * 4, c);
}
}
这里有一个隐含的要求,就是 A、B 和 C 三个向量的地址需要对齐,三者的起始地址必须是 16 的倍数(1 个浮点数 4 个字节,需要连续 4 个浮点数),所以分配地址时也需要对齐分配。在 64 位机器上如果只是调用普通的 malloc 分配内存,通常起始地址只是 8 的倍数,因此在分配内存时要尤其小心——很多底层线性代数库通常也提供这样的高层对齐内存分配函数
第二个要讨论的是数据布局(data layout)。当我们要存储一个多维矩阵时,至少对于 CPU 内存来说,存储空间实际上是一个扁平的一维数组。因此,对于二维矩阵来说,其每个元素 A[i, j],可以有两种方法映射到这个一维数组中。以一个 2×3 的矩阵来说,最简单的存储方法是先放第一行,再放第二行——这种方法也称为行主序(row major),映射方法为 A[i, j] => Adata[i * A.shape[1] + j],例如在这里就是 Adata[i * 3 + j]。这种方法也是人们在常见的编程语言(例如 C 语言)中存储多维数组的方法。不过,在一些古老的编程语言中(例如 FORTRAN),所采取的的是另一种称为列主序(column major)的形式,即先存第一列,再存第二列,以此类推,此时映射方法变为 A[i, j] => Adata[j * A.shape[0] + i]
也可以超越上述两种方法存储数组。一些库引入了“跨步”(stride)的概念,表示偏移量,或者说,在某个轴上放置下一个元素时要累加的增量。假如某个二维数组设置了偏移量属性,那么映射方式变为 A[i, j] => Adata[i * A.strides[0] + j * A.strides[1]]。这种映射方法也可以推广到多轴情况。Stride 是一种比行主序或者列主序更通用的方法。仍以 2×3 的矩阵为例,如果 strides 属性设为 [1, 2],那么根据上面的映射法则,A[i, j] => Adata[i * 1 + j * 2] = A[i + j * 2] 就是列主序形式,而如果设成 [3,1] 同理可知就对应了行主序形式。另外,stride 使得在对数据做布局变换时更有灵活性,例如
- 做数组切片时,只需要修改初始偏移量和形状就可以,不需要拷贝底层数据
- 做转置时,也只需要交换 stride 就可以
- 做广播操作时,只需要插入一个值为 0 的 stride
不过,当使用 stride 时,数组的内存地址可能不再连续,使得向量化操作变得比较困难。因此一些线性代数操作先让数组变得“紧凑”,通过类似 PyTorch 中 contiguous 这样的方法让数组占用一块连续空间
第三个技术称为并行化(parallelization)。例如,对于前面的例子,可以加一个注解,利用 openmp 框架进行并行
void vec_add(float *A, float *B, float *C) {
# 下面这一段使用openmp指令进行并行化
# pragma omp parallel for
for (int i = 0; i < 64; ++i) {
float4 a = load_float4(A + i * 4);
float4 b = load_float4(B + i * 4);
float4 c = add_float4(a, b);
store_float4(C + i * 4, c);
}
}
这样,每次迭代时就可以把指令分配到不同的 CPU 上。假设我们有 4 个 CPU 核,则这个循环会进一步划分为 4 块,每一块分给一个 CPU 核
实例研究:矩阵乘法
对矩阵乘法,我们从最直接的算法开始。假设要计算 C = dot(A, B.T)。考虑最简单的情况,三个矩阵都为 n 阶方阵,则有
float A[n][n], B[n][n], C[n][n];
for (int i = 0; i < n; ++i)
for (int j = 0; j < n; ++j) {
C[i][j] = 0;
for (int k = 0; k < n; ++k) {
C[i][j] += A[i][k] * B[j][k];
}
}
这是一个
因此,接下来做一些和体系架构相关的分析。假设我们的硬件只有 DRAM 和寄存器,对前面的代码加一些显性注释,指明各个变量存储的位置,有
dram float A[n][n], B[n][n], C[n][n];
for (int i = 0; i < n; ++i)
for (int j = 0; j < n; ++j) {
register float c = 0;
for (int k = 0; k < n; ++k) {
register float a = A[i][k];
register float b = B[j][k];
c += a * b;
}
C[i][j] = c;
}
现在可以计算数据读取次数,有
- 把
A的元素从内存读入寄存器的次数: - 把
B的元素从内存读入寄存器的次数: - 所需要的的寄存器个数:3(a、b 和 c)
因此总的读取代价为
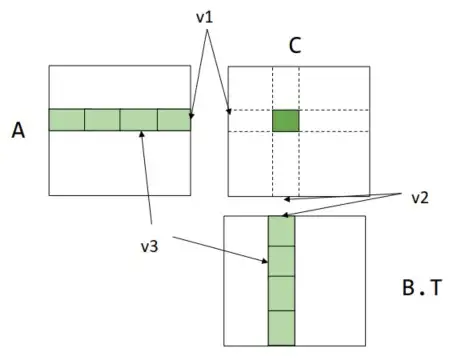
一种加速方法是每次不计算一个元素,而是计算一个子矩阵。将结果矩阵 C 切分为 A 切分成 B 切分成
dram float A[n/v1][n/v3][v1][v3];
dram float B[n/v2][n/v3][v2][v3];
dram float C[n/v1][n/v2][v1][v2];
for (int i = 0; i < n/v1; ++i) {
for (int j = 0; j < n/v2; ++j) {
register float c[v1][v2] = 0;
for (int k = 0; k < n/v3; ++k) {
register float a[v1][v3] = A[i][k];
register float b[v2][v3] = B[j][k];
c += dot(a, b.T);
}
C[i][j] = c;
}
}
对上述代码进行分析
- 把
A读进内存的迭代次数减少为�/�1×�/�2×�/�3,但是在最内层要读入一个�1×�3 的区域,所以总读取次数是�/�1×�/�2×�/�3×�1×�3=�3/�2 - 类似地,
B的总读取次数为�3/�1 A需要�1×�3 个寄存器,B需要�2×�3 个,C需要�1×�2 个
这意味着总的读取代价不再是固定的�3,而是由�1 和�2(称为分块因子 tiling factor)决定。最优的做法肯定是尽量放大�1 和�2,但是也要注意不要超过寄存器的数量(注意�3 不影响读取次数,所以可以设为 1)
可以再往深想一下:为什么这种方法可以减少数据加载次数呢?因为最内层的数据会被复用很多次,a 中的数据会被复用�2 次,因此开销的降低实际来源于我们把变量读入寄存器以后复用了内存
接下来考虑另一种更加复杂的情况,称为行缓存(cache line)
dram float A[n/b1][b1][n];
dram float B[n/b2][b2][n];
dram float C[n/b1][n/b2][b1][b2];
for (int i = 0; i < n/b1; ++i) {
l1cache float a[b1][n] = A[i];
for (int j = 0; j < n/b2; ++j) {
l1cache b[b2][n] = B[j];
C[i][j] = dot(a, b.T);
}
}
这里引入了两个分块因子�1 和�2,期望每次能计算得到�1×�2 大小的子矩阵。这里不是将数据读入寄存器,而是每次将若干行数据读入 L1 缓存(通常不能直接操作 L1 缓存,这里仅做示意用)。对上述代码做分析
- 把
A读入内存的迭代次数为�/�1,每次读入�1×�数据,所以总计读取次数为�/�1×�1×�=�2 - 类似地,把
B读入内存的迭代次数为�/�1×�/�2×�2×�=�3/�1
进一步地,我们希望�1 和�2 是�1 和�2 的整数倍,这样可以进一步再利用寄存器分块策略。另外,�1×�+�2×�也不应超出 L1 缓存的大小。将上述两部分代码整合在一起,有
dram float A[n/b1][b1/v1][n][v1];
dram float B[n/b2][b2/v2][n][v2];
for (int i = 0; i < n/b1; ++i) {
l1cache float a[b1/v1][n][v1] = A[i];
for (int j = 0; j < n/b2; ++j) {
l1cache float b[b2/v2][n][v2] = B[j];
for (int x = 0; x < b1/v1; ++x) {
for (int y = 0; y < b2/v2; ++y) {
register float c[v1][v2] = 0;
for (int k = 0; k < n; ++k) {
register float ar[v1] = a[x][k][:];
register float br[v2] = b[y][k][:];
C += dot(ar, br.T);
}
}
}
}
}
这段代码最内层 ar 的加载次数为�/�1×�/�2×�1/�1×�2/�2×�×�1=�3/�2,类似的,br 的加载次数为�3/�1。这两个变量都是从 L1 缓存加载而来。将数据从内存读入 L1 缓存的次数,由上面的计算,为�2 和�3/�1
尽管这只是在一个理想模型上做的近似推导,且最后的读取次数仍然是�3 量级,但是由于各个分块因子的存在,代码的耗时比原先切实的�3 次读取时间快很多,而如果进一步优化和重组代码,应该还有提升空间(例如加入并行化)
再次强调,速度的提升来自于变量的复用。在寄存器分块的例子中,a 被复用了�2 次,b 被复用了�1 次,因此真正要做的是思考复用的模式。观察代码中循环的模式
C[i][j] = sum(A[i][k] * B[j][k], axis=k)
A 中元素的轴独立于 j,所以如果将 j 分为 v 块,就复用了 v 次 A(迭代过程缺哪个,就分哪个,例如 B 的迭代缺少 i,则将 i 分 v 块就是复用了 v 次 B)。